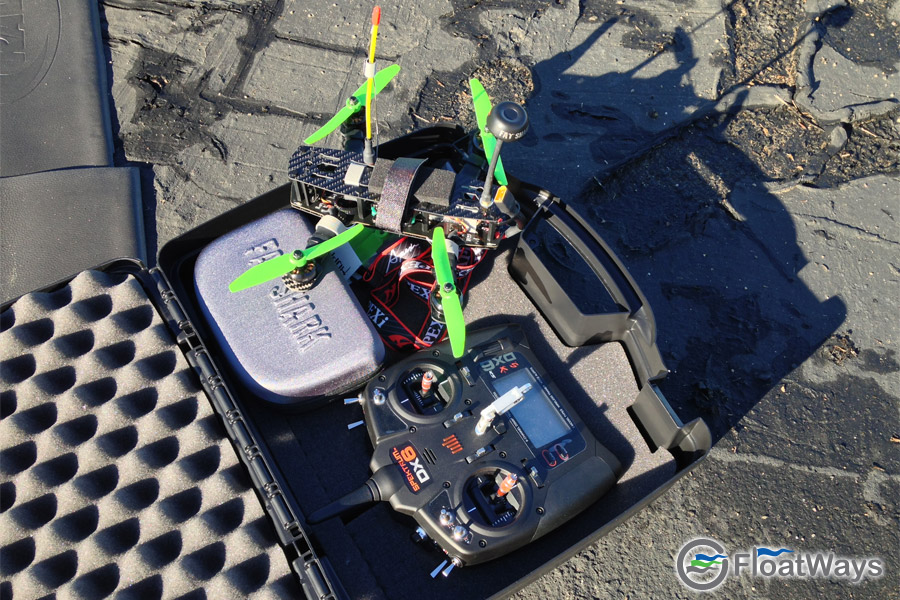
This morning I flew my new Blackout Mini H Quad again. 3 flights. These would be flights number 8,9 and 10 for the new quad.

Earlier this morning I adjusted some of the PID settings on Cleanflight for the Naze32 to tune the craft a little more. I had originally done hybrid settings comparing my friend’s PIDs to those of PFV superstars Metalldanny and Boris B. Then this morning, I adjusted those settings a little more.
The first flight was LOS (line of sight) in order to check the new PIDs. After flying my tricopter so much last year, I’m truly amazed at how locked in this mini quad flies. It’s amazing to fly line of sight, although you can’t go too far or you start losing orientation. After a few hover-only flights to test out the BO Mini H Quad a few days prior, this would be one of the very first forward-flying sessions. I can tell you, I was flying just fine. I was doing figure eights and ovals as comfortable as I’m on the tricopter.

Once thing though, I’m using PID controller 1 on Cleanflight (Rewrite from MultiWii), which apparently is not great in self-leveling mode (angle mode). That said, I fly rate mode 99.9% of the time. However, I like to set a switch so that I can easily flick to angle mode in case I lose orientation to save me from a crash. Unfortunately, with PID controller 1, angle mode flies like the quad’s epileptic with the currents PIDs. What I did notice though is that is does self-level decently enough at least. Because I only want that mode for emergencies, I’m going to continue tuning to rate mode and disregard how well it flies in angle mode as long as I can self-level it in an emergency upon losing orientation or something.
The ground was wet as it rained a lot yesterday. I was trying to make sure not to touch the ground. For take off, I used a pair of yoga mats to fashion a makeshift heli pad. That worked out alright. Taking off and landing on the mats while flying line of sight was a breeze.
However, I knew I would likely not be able to land on the mats while flying FPV. The following two flights would be only my second and third FPV flights, ever. I just passed my HAM tech exam a week and a half prior and has just finally started flying in 5.8Ghz.
The two follow up FPV flights were a smashing success. I did touch the ground once, but I managed to recover with no further incidents. Even better was that I was forward flying FPV, not just hovering. What I did to land was I lined up the quad in front of me, looking out – With of course, help from my spotter. Once lined up in front of me I quickly took my goggles off and once adjusted to the searing light, I would land line of sight on the yoga mat landing pads. I did this just to avoid landing on the wet grass.
I haven’t crashed or broken any of my HQ 5040 props yet. Which means, like usual, I’m taking things slow and being extra careful. Once I get more comfortable and start doing stupid things, then the story might change 😉
Update: Fast forward a year… In an effort to keep things focused I’ve decided to open a separate multirotor and mini quad blog. I did this for various reasons. For one, I’ve gained tons of experience and learned a lot about RC flight, FPV mini quads and racing drones. The new blog will help to share that experience. Also, it will help keep things on the correct topic across sites. To find it go to: PinchTune Multirotor Blog.